Attuatori Lineari, Sistemi Meccanicamente Integrati, Robotica, Sistemi Multi-Asse
Aggiunta di un settimo asse al sistema robotico a sei assi
3 feb, 2021
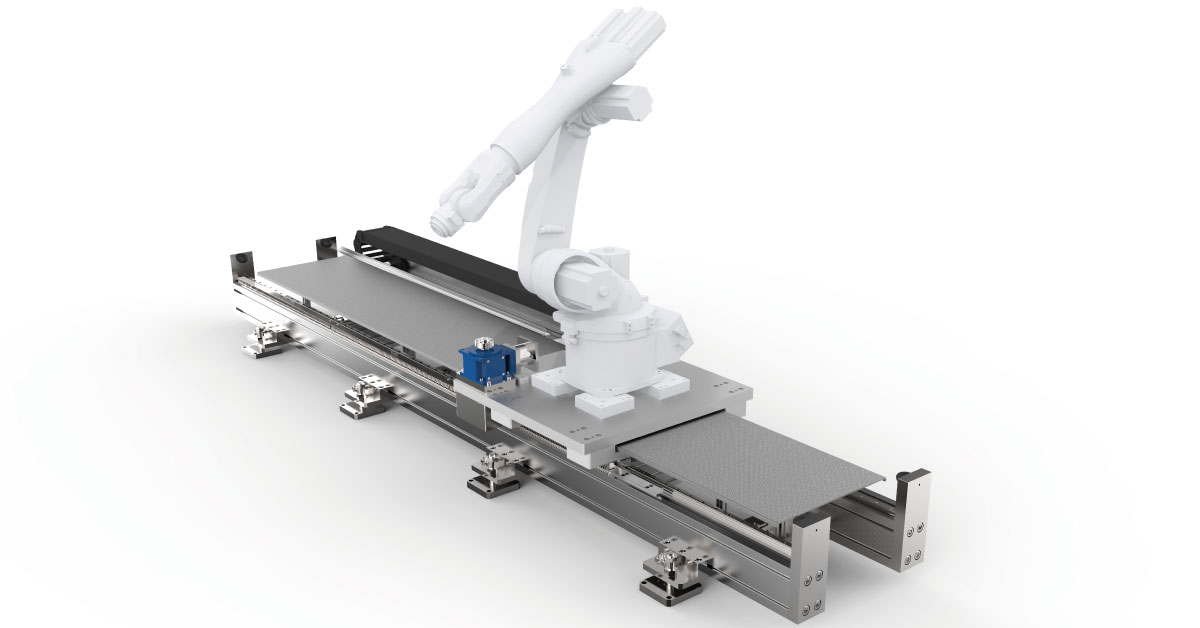
Molte attività automatizzate nei settori automobilistico, elettronico e dei beni di consumo sono svolte da sofisticati robot antropomorfi progettati per eseguire operazioni molto precise velocemente. Se, tuttavia, può essere vantaggioso spostare questi robot in diverse posizioni nel layout produttivo ha senso valutare l’aggiunta di un settimo asse, soluzione che va a costituire uno "shuttle" capace di movimentare il robot su diverse stazioni e così estendere la propria area operativa.
L'aggiunta di un settimo asse: cosa comporta
L'aggiunta di un settimo asse espande l'area di lavoro del robot, aumenta l'efficienza della macchina e riduce i costi, favorendo un rientro dall’investimento molto più rapido.
Tuttavia per capitalizzare al meglio su questa scelta tecnologica avere chiaro in mente una serie di variabili/componenti tecnici.
Vediamo quali.
Capacità di carico
Poiché i carichi statici si verificano quando il robot è fissato in posizione, il peso del carico, la flessione e il centro di gravità sono i fattori più importanti da considerare.
La base del robot deve essere abbastanza forte da supportare il carico e abbastanza robusta in modo che non si ribalti quando il braccio muove il proprio carico utile.
Capacità di carico dinamico
I carichi dinamici entrano in gioco quando il robot si muove lungo il proprio percorso lineare.
Un margine di sicurezza di dimensioni corrette è quindi fondamentale da tenere in considerazione.
Devono essere dimensionati anche gli arresti affinché sia impedito al robot di uscire dalla propria guida, specie se a pieno carico.
Velocità e accelerazione
Per abbinare l'attuatore al robot, è importante conoscere le velocità di spostamento richieste e le velocità di accelerazione / decelerazione.
Alcuni attuatori lineari sono progettati per gestire carichi pesanti a velocità fino a 5 m / s, mentre altri sono pensati per operazioni più leggere e lente.
Precisione e accuratezza
I requisiti di precisione e ripetibilità di un'applicazione dovrebbero guidare la selezione dell'hardware.
Per prevenire la deflessione, potrebbero essere necessarie travi di supporto aggiuntive se più robot condivideranno una guida.
Inoltre, potrebbe essere necessario integrare i perni di posizionamento o altre funzioni di allineamento nel design della guida per fornire al robot un punto di riferimento per la calibrazione.
Ciclo di lavoro e durata
Per iniziare, va considerato il ciclo di lavoro e il tempo di ciclo dell’applicazione.
Il robot verrà utilizzato 24 ore su 24 o solo poche ore al giorno?
Per due, cinque o 10 anni?
Per saperne di più sull'aggiunta di un settimo asse al tuo sistema robotico, scarica il nostro ultimo white paper.

Potrebbero interessarti
Lascia un commento

Stai utilizzando la guida giusta per i tuoi progetti?
Rollon presenta la nuova generazione delle proprie guide lineari a cuscinetti con una capacità unica di gestire il disallineamento delle superfici di montaggio.
GUARDA IL WEBINAR