Układ bramowy, Moduły liniowe, Robotyka
Robot kartezjański czy antropomorficzny?
19 lip, 2021
ROBOT KARTEZJAŃSKI CZY ANTROPOMORFICZNY? PRZY WYBORZE NALEŻY WZIĄĆ POD UWAGĘ WYDAJNOŚĆ, POZYCJĘ W UKŁADZIE I PRZESTOJE
Automatyka przemysłowa nie jest już ani opinią, ani opcją. Jest faktem. Jako konkretna część biznesu zwiększa złożoność pracy projektantów przemysłowych i planistów mających za zadanie zaprojektowanie nowych rozwiązań ulepszających procesy oraz zwiększających wydajność i skuteczność produkcji.
Jak więc wybrać najlepsze rozwiązanie automatyki przy tworzeniu nowych procesów obejmujących jedną lub kilka aplikacji lub też przy rozwijaniu istniejących procesów? Z drugiej strony jak można uniknąć podążania drogą automatyki bez zwiększania kosztów i utraty funkcjonalności, której wymaga firma?
Często pierwszym wyborem projektantów są roboty antropomorficzne. Robot kartezjański, może okazać się dobrą opcją na wielu polach zastosowań, a w wielu przypadkach, porównując oba rozwiązania, co za chwilę pokażemy, może okazać się wręcz lepszy pod wieloma względami.
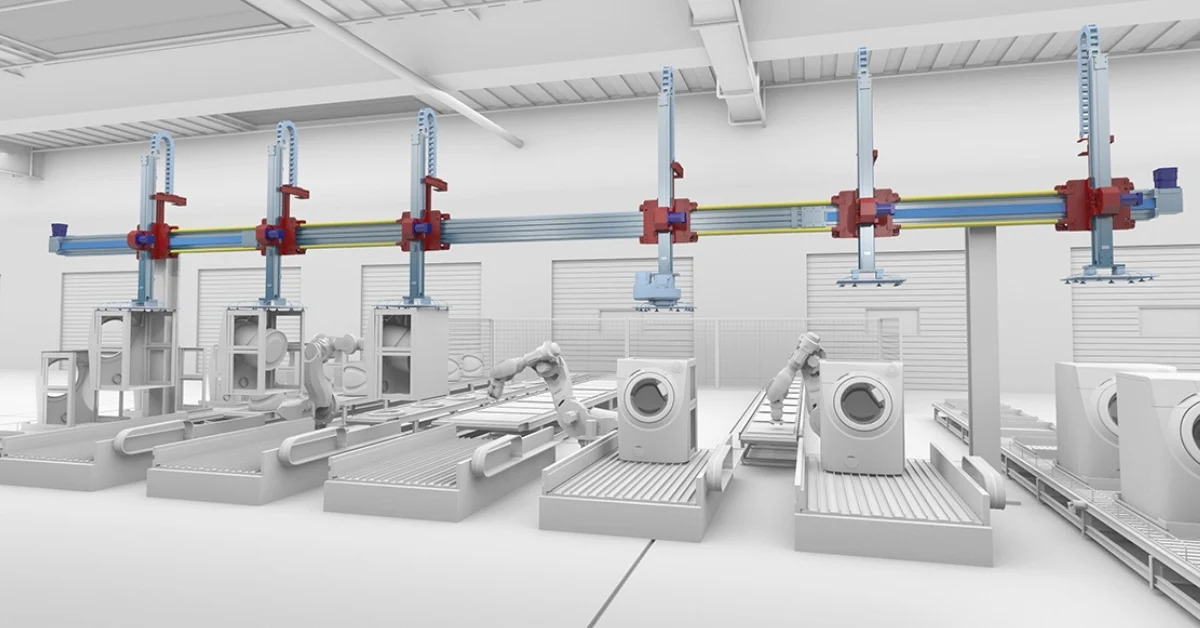
Zautomatyzowane kartezjańskie systemy liniowe nadają się szczególnie do zapewnienia wysokiej wydajności i doskonałych rezultatów w specjalnych warunkach roboczych lub w układach linii produkcyjnych.
Na przykład, jeśli:
- aplikacja wymaga ruchu liniowego na dużym obszarze roboczym;
- konieczne jest znalezienie miejsca na automatykę linii bez tworzenia przeszkód przed/wokół maszyny (co jest praktycznie niemożliwe przy zastosowaniu robotów antropomorficznych);
- wymagana jest niezależność między wózkami na pojedynczej osi lub interpolacja ruchów osi o różnych długościach i/lub kierunkach;
- konieczne jest przenoszenie bardzo ciężkich ładunków na osi Z (pionowej).
- Jednym z czynników, które należy brać pod uwagę przy zarządzaniu robotem jest możliwość zastosowania taniej i prostej konserwacji...
...w tym przypadku lepszą opcją jest robot kartezjański.

Wydajność, najwyższe osiągi „bez ograniczeń” w obszarze roboczym
Kiedy mamy do czynienia z długą inia produkcyjną z półwyrobami poruszającymi się między różnymi stanowiskami lub też, gdy układ obszaru produkcyjnego ma ograniczoną przestrzeń wokół maszyny (lecz umożliwia montaż pionowy), robot kartezjański zapewni lepsze osiągi w stosunku do robota antropomorficznego, również z ekonomicznego punktu widzenia”.
Ile robotów antropomorficznych należałoby zainstalować, uruchomić i utrzymać w ruchu do wykonywania tej samej pracy, którą może wykonać jeden robot kartezjański? Ile czasu zająłby zwrot ze znaczącej inwestycji, jaką jest każdy robot, gdy musiałyby one „czekać na swoją kolej” między różnymi etapami pracy?
A co by się stało, gdyby, w takim samym scenariuszu, ładunki do przenoszenia były bardzo ciężkie - tak ciężkie, że wymagałyby większego robota do wykonywania poszczególnych etapów, ze wszystkim co się z tym wiąże (ponownie) pod względem rozmiaru, pozycji w układzie i kosztów?

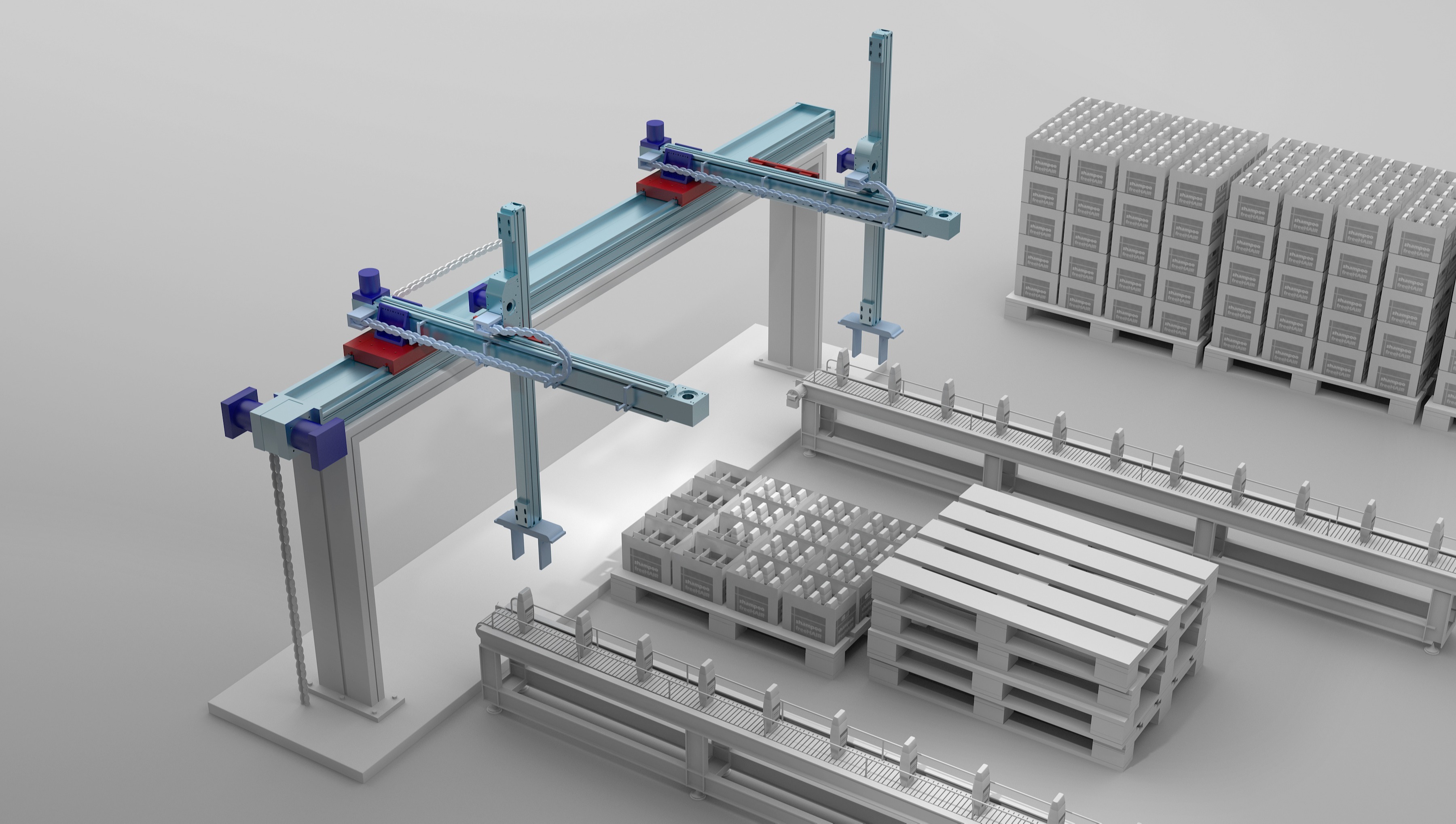
W takich sytuacjach - na przykład w dużych obszarach roboczych z wieloma stanowiskami - robot kartezjański staje się naturalnym rozwiązaniem dla automatyzacji procesu.
Faktycznie, rozwiązanie to pozwala na zautomatyzowanie wielostanowiskowych linii produkcyjnych przy użyciu robota, który nigdy nie musi się zatrzymywać, wręcz przeciwnie, może stale poruszać się między różnymi stanowiskami, na których jest potrzebny.
Rozwiązanie kartezjańskie spełnia również wymagania niezależnego ruchu na pojedynczej osi, który może okazać się konieczny w celu optymalizacji cyklu roboczego.
Ruch wzdłuż trzech osi X, Y, Z może zostać ustawiony zgodnie z indywidualnymi potrzebami ruchu i automatyki w tym samym czasie i, jak już wspomniano, w pełnej autonomii.
Możliwość tę zapewnia użycie rozwiązań wielowózkowych, zdolnych do indywidualnego poruszania ładunków lub zespołów złożonych jednostek, wspomagających różne obszary procesu produkcyjnego na różne i specyficzne sposoby.
Na przykład można użyć napędu zębatkowego na osi Y z zsynchronizowaną osią X oraz niezależną osią Z lub też innej specjalnej kombinacji, poruszając do 14 wózków w tym samym procesie i w tym samy czasie, w zależności od zaplanowanej i rozpoczętej aplikacji.
Jest to również podejście, które pozwala na dalsze uwolnienie obszaru roboczego dzięki podnośnikom pionowym, które umożliwiają „zniknięcie” osi i narzędzi.
Jak już wspomnieliśmy, robot kartezjański oferuje również polepszenie nośności połączone z wolnością ruchu, przy jednoczesnym utrzymaniu wolnej przestrzeni w układzie produkcyjnym.

W przypadku ciężkich ładunków w procesach produkcyjnych na linii wielostanowiskowej, rozwiązanie z robotem kartezjańskim jest najlepszą opcją.
Faktycznie, jest to jedyny rodzaj automatyki, zdolnej do poruszania znacznie większymi ładunkami na osi Z w stosunku do robota antropomorficznego, przy jednoczesnym utrzymaniu wymaganej pozycji i zagwarantowaniu precyzji i powtarzalności, a wszystko to bez wpływu na dynamikę.
Dynamiczność robota kartezjańskiego jest szczególnie interesująca, gdy weźmiemy pod uwagę aspekt instalacji i konserwacji.
Podczas gdy niezaprzeczalnym faktem jest, że konstrukcja indywidualnie dostosowanego robota kartezjańskiego dla specyficznej aplikacji ma wyższe koszty podstawowe od pojedynczego robota kartezjańskiego - sytuacja zmienia się odwrotnie proporcjonalnie do liczby robotów, którą należy zakupić dla wszystkich stanowisk wymagających automatyki - niezaprzeczalne jest również, że konserwacja i serwis posprzedażowy są drastyczne zredukowane, zarówno z powodu łatwej konserwacji, która praktycznie zawsze może być wykonywana przez techników użytkownika, jak i pod względem poniesionych kosztów.
Różnica staje się znaczna, gdy pomyślimy jak skomplikowanej konserwacji wymaga robot antropomorficzny, nie tylko pod względem kosztu godzinowego serwisu, lecz również z punktu wiedzenia czasu wymaganego na wykonanie czynności konserwacji, a co za tym idzie, przestojów w produkcji i wiążącą się z nimi utratą wydajności i zysku.
Kto powiedział, że nie są one elastyczne?
Rzućmy wreszcie okiem na zagadnienie aplikacji i elastyczności operacyjnej robota antropomorficznego w porównaniu z robotem kartezjańskim.
Dynamika układu kartezjańskiego jest „równoważona” operacyjną elastycznością‚ robota antropomorficznego, jednak bardzo często koszty obejmujące przemieszczenie, ponowne zaprogramowanie i konstrukcję specyficznych szczęk są dość wysokie.
Gdzie znajdują zastosowanie roboty kartezjańskie?
Jeśli więc projektant prześledził powyższą listę zagadnień „jeśli” i zrozumiał, że powinien wybrać automatykę kartezjańską, kolejne pytanie powinno dotyczyć sektora przemysłu, w którym znajdują zastosowanie roboty kartezjańskie.
Kilka typowych sektorów przemysłowych, w których sprawdzają się roboty kartezjańskie to:
- Opakowania
- Obróbka blachy
- Logistyka
- Przemysł spożywczy
- Przemysł motoryzacyjny
- Malowanie
Główny punkt: siódma oś, gdzie robot kartezjański spotyka się z robotem antropomorficznym
Czy istnieją sytuacje,w których zdolności i dynamika robota kartezjańskiego spotykają zdolności robota antropomorficznego?
Odpowiedź brzmi tak: staje się tak w warunkach, które wymagają od robota poruszania się po zewnętrznych osiach liniowych, stając się, praktycznie rzecz biorąc, siódmym stopniem wolności lub, stosując prawidłową nazwę, siódmą osią.

Gdzie mogą się wystąpić takie warunki?
Tam gdzie konieczne jest powiększenie obszaru działania robota. Przeważnie dzieje się tak przy wprowadzaniu nowego projektu lub przy ulepszaniu osiągów istniejącej linii.
Zastosowanie siódmej osi może rekompensować pewne niedoskonałości związane ze wszystkimi „statycznymi” rozwiązaniami. Faktycznie, robot antropomorficzny, który porusza się na siódmej osi może:
- Zwiększyć swą elastyczność, pracując, w wyznaczonych limitach, na wielu stanowiskach/maszynach lub też umożliwiając innym robotom poruszanie się na tej samej osi
- Zwiększyć produkcję i wydajność (również z ekonomicznego punktu wiedzenia) maszyny, która dzięki temu, że może się poruszać, może być wykorzystywana na wielu stanowiskach, co zwiększa jej funkcjonalność i zwrot z inwestycji
- Zwiększyć ogólne osiągi linii poprzez przenoszenie swych zdolności operacyjnych, takich jak precyzja, prędkość i powtarzalność, z jednego punktu linii do drugiego.
Chcesz dowiedzieć się więcej o siódmej osi?
Może Cię zainteresować
Zostaw komentarz

Poszukują Państwo siłowników liniowych do swoich zastosowań?
W naszej ofercie znajdują się elektryczne siłowniki liniowe z napędem pasowym, śrubowym lub zębatkowym, aby zagwarantować najlepszą wydajność w zależności od potrzeb danej aplikacji.
DOWIEDZ SIĘ WIĘCEJ